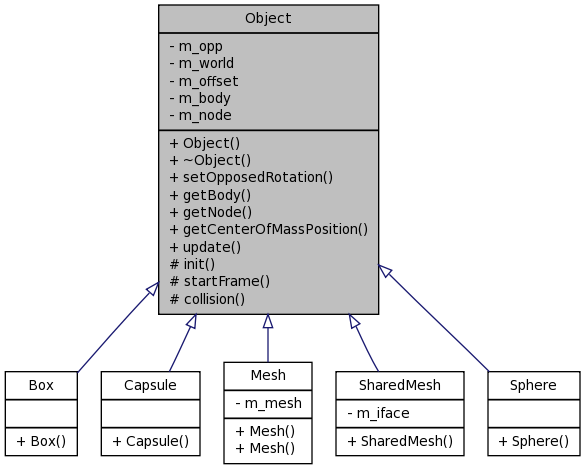
Object Class Reference
Base class for all physics-enabled game objects. More...
Public Member Functions | |
| Object (irr::scene::ISceneNode *node) | |
| ctor | |
| virtual | ~Object () |
| dtor | |
| void | setOpposedRotation (bool y) |
| btRigidBody * | getBody () const |
| irr::scene::ISceneNode * | getNode () const |
| btVector3 | getCenterOfMassPosition () const |
| virtual void | update () |
| Handler called at the end of each frame. | |
Protected Member Functions | |
| virtual void | init (btCollisionShape *shape, btScalar mass) |
| Initialize the collision object from a shape and a mass. | |
| virtual void | startFrame () |
| Handler called at the beginning of each frame. | |
| virtual void | collision (Object *obj, btPersistentManifold *manifold, float scale) |
| Handler called upon collision with another Object. | |
Friends | |
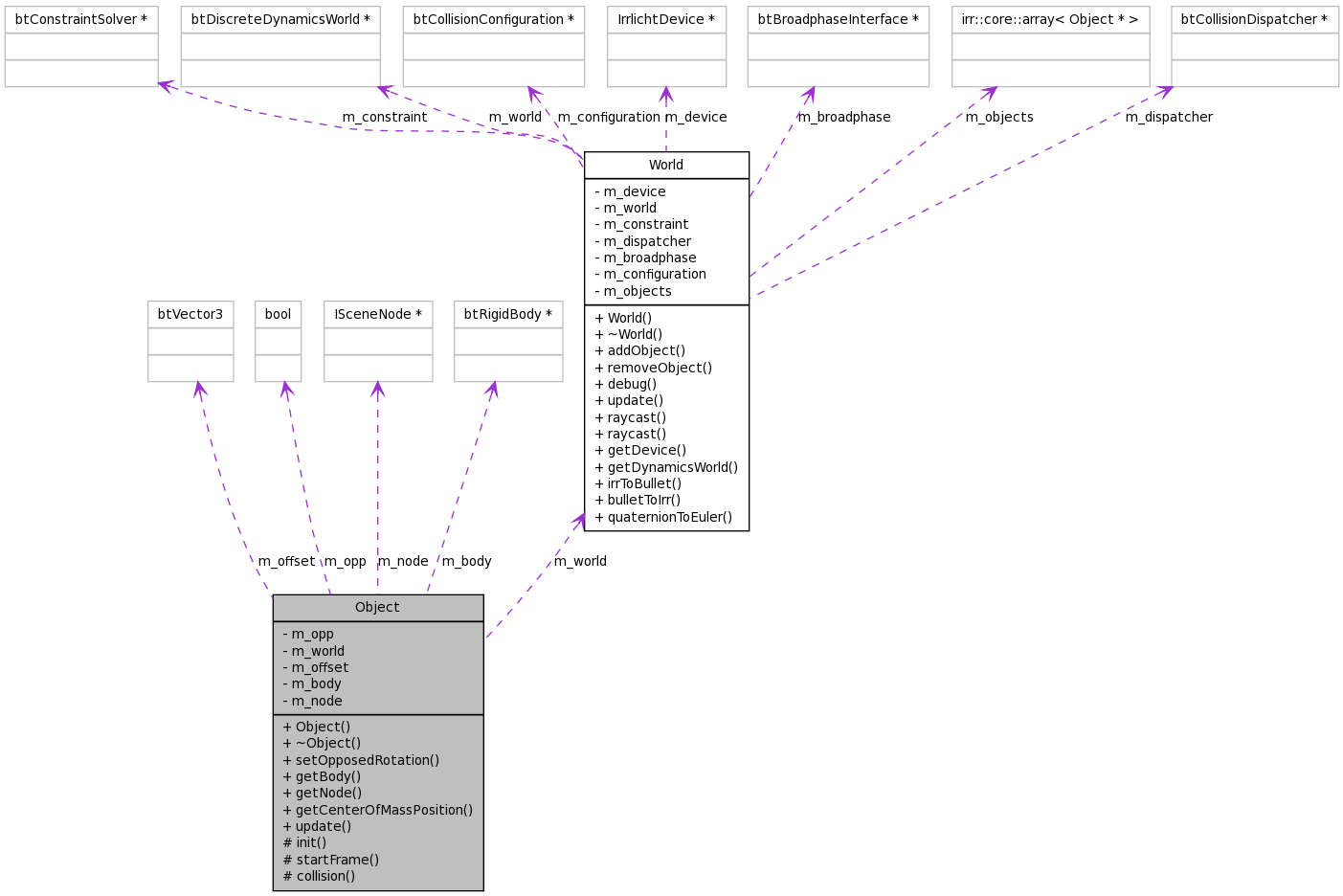
| class | World |
Detailed Description
Base class for all physics-enabled game objects.An Object is attached to an Irrlicht scene node and changes its position based on input from the Bullet engine.
It must have a collision shape and a mass, set in the init() method and thus this class should be considered virtual (even though it is not) unless you know what you are doing.
Constructor & Destructor Documentation
| Object::Object | ( | irr::scene::ISceneNode * | node | ) |
ctor
- Parameters:
-
node Scene node to manage
Member Function Documentation
| btRigidBody * Object::getBody | ( | ) | const |
- Returns:
- pointer to the Bullet rigid body object
Referenced by World::addObject(), Character::Character(), World::removeObject(), Character::update(), Camera::update(), and Character::~Character().
| irr::scene::ISceneNode * Object::getNode | ( | ) | const |
| btVector3 Object::getCenterOfMassPosition | ( | ) | const |
- Returns:
- position of the center of mass
This method actually only affects the Y component of the position vector, based on the bounding box.
Referenced by Player::update(), and Camera::update().
| void Object::update | ( | ) | [virtual] |
Handler called at the end of each frame.
The default implementation simply update the position of the attached scene node.
References World::quaternionToEuler().
Referenced by Character::update(), and Camera::update().
| void Object::init | ( | btCollisionShape * | shape, | |
| btScalar | mass | |||
| ) | [protected, virtual] |
Initialize the collision object from a shape and a mass.
- Parameters:
-
shape collision shape of the object mass mass of the object (negative for kinematic object and null for static ones)
References World::irrToBullet().
Referenced by Box::Box(), Capsule::Capsule(), Mesh::Mesh(), SharedMesh::SharedMesh(), and Sphere::Sphere().
The documentation for this class was generated from the following files:
